哈工大报








最新发布
- 06-23
- 06-23
- 06-23
- 06-22
- 06-21
- 06-20
- 06-20
- 06-19
哈工大赵杰教授团队朱延河教授在空间模块化机器人自修复领域取得新进展
-
分享
微信扫一扫:分享
哈工大全媒体(阚思邈 齐健/文 齐健/图)近日,我校机器人技术与系统全国重点实验室赵杰教授团队朱延河教授在空间模块化机器人自重构、自修复领域取得新进展,相关研究成果以《面向大规模在轨组装通过协作重构实现容错的模块化机器人集群》(Fault-tolerant modular robotic swarm through cooperative reconfiguration for large-scale on-orbit assembly)为题发表于《极端制造(英文)》(International Journal of Extreme Manufacturing,IJEM)上。该研究为在复杂恶劣的空间环境中构建强鲁棒、可自持的机器人集群提供了新的设计思路与容错技术支撑。
空间环境具有真空失重、高温差、强辐射等极端恶劣的特点,保障空间机器人安全可靠地运行是开展在轨服务的重要前提。常规手段主要依赖提高部件可靠性以期避免失效,然而在极端环境下,意外故障总是难以完全规避。人工维修不仅安全风险高、成本高昂,而且用于替换的备份部件通常无法及时到位。因此,在缺乏备用资源的极端条件下,发展无需系统外部干预的自主容错与修复能力是一项关键挑战。
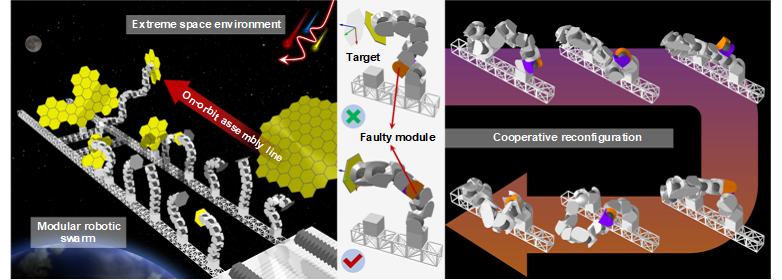
模块化机器人集群在轨组装场景、协作重构的容错流程
针对上述难题,团队提出一种基于协作重构的模块化机器人自主容错修复策略,通过改变形态来恢复关节故障引起的损伤。这个过程不需要使用备份模块替换故障模块,可以更好地适应资源稀缺的在轨极端环境。基于模块间的局部感知能力和指数积公式,建立了模块化机器人的拓扑描述和运动学自建模方法。在发生故障之后,以最大化机器人的操作能力为优化目标,利用粒子群算法搜索重构的目标构型。基于改进快速扩展随机树(RRT)的协作重构算法,引导路径节点避开不可行区域,提高采样效率和规划成功率,使模块机器人由初始的失效构型转变为能够完成任务的新构型。组装任务的实验分析验证了所提方法可以提高机器人的容错能力。在设定的极端多故障场景下,相比于固定构型仅依靠冗余度的容错方法,协作重构将容错上限提高了7倍。另外,在考虑任务环境的约束时,即便增加更多的冗余度,固定构型机器人可能依旧失效,协作重构的优势进一步凸显。尤其在串行的大规模机器人群组装线中,局部故障可能使整条组装线瘫痪。此时,协作重构通过局部修复提高整个集群系统的自持能力,避免“千里之堤,溃于蚁穴”。团队提出的变形容错策略,不仅有望保障空间机器人集群的组装与制造能力,还可推广至深海勘探、核设施维护等故障频发且资源受限的极端场景,为构建鲁棒的机器人集群提供了新的设计思路。
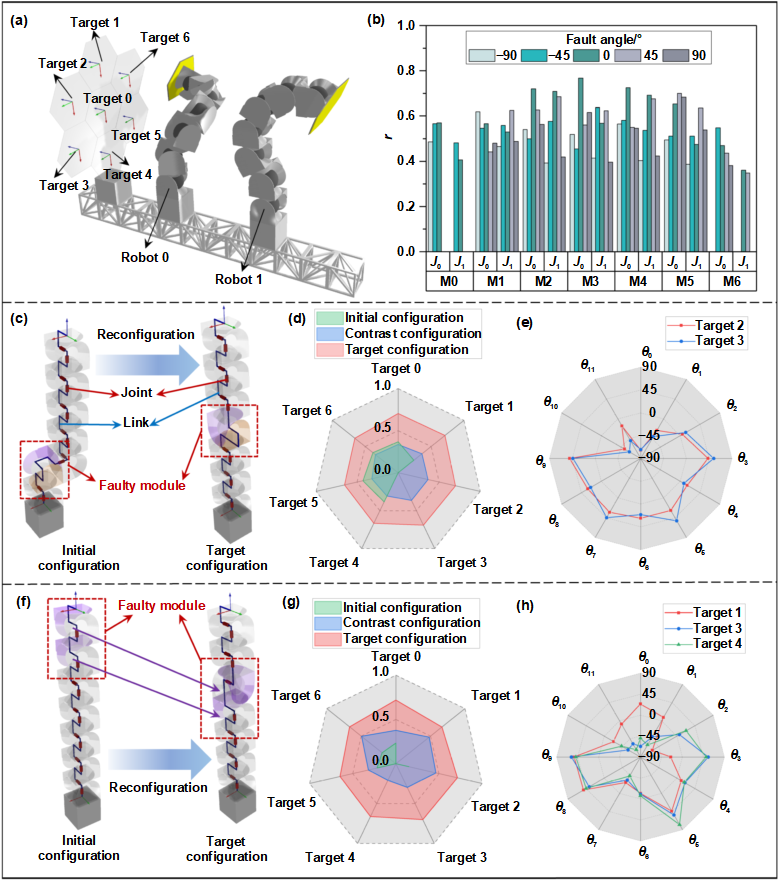
协作重构使模块化机器人操作能力再生
模块化机器人协作重构
哈工大为论文唯一完成单位与通讯单位。机电工程学院朱延河教授为论文通讯作者,博士生齐健为论文第一作者,赵杰教授、郑天骄副研究员、赵思恺助理研究员等为论文共同作者。
该项目获国家自然科学基金重点项目、机器人技术与系统全国重点实验室项目的资助。
论文链接:http://www.ijemnet.com/article/doi/10.1088/2631-7990/ae6bde