哈工大报







最新发布
- 04-29
- 04-29
- 04-29
- 04-29
- 04-28
- 04-28
- 04-27
- 04-27
哈工大赵杰教授团队张赫教授在微创内耳手术机器人领域取得新进展
-
分享
微信扫一扫:分享
哈工大全媒体(阚思邈 高培源/文 李海铭/图)近日,机电工程学院赵杰教授团队张赫教授在微创耳科手术机器人领域取得重要进展,创新性地提出了一种以耳道为手术入路的内耳手术机器人系统,突破了狭小曲折人体解剖空间下手术机器人灵巧操作、智能感知、精准控制等技术难点,实现了微创的内耳药物注射和淋巴液采样手术,结合基因疗法可实现术后无创的先天性耳聋疾病治疗。相关研究成果以《面向微创经耳道内耳介入手术的交互感知灵巧机器人》(Interaction-aware dexterous robot for minimally invasive transcanal inner ear interventions)为题发表于《自然通讯》(Nature Communications)。该研究为内耳疾病的基础研究与临床转化提供了全新的技术路径与平台支撑,有望推动内耳手术术后无创化变革性发展,提升内耳功能性障碍和先天性耳聋等疾病诊疗技术。
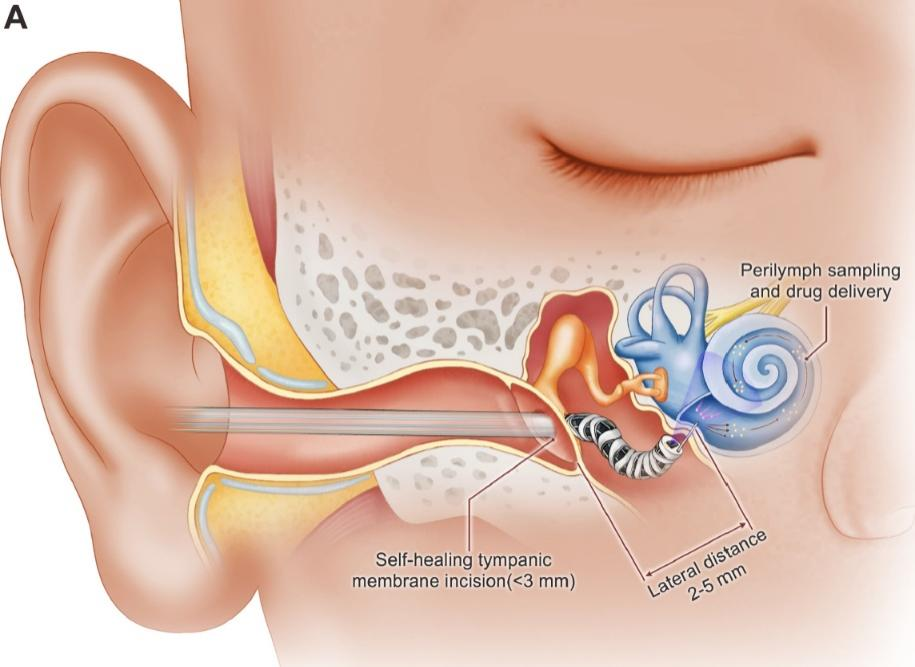
DS-MDCR(Dual-Segment Miniature Dexterous Continuum Robot)通过自愈性鼓膜切口进入内耳,经空间S形弯曲导航穿过狭窄解剖结构,到达圆窗膜进行精准穿刺、微量采样及药物递送
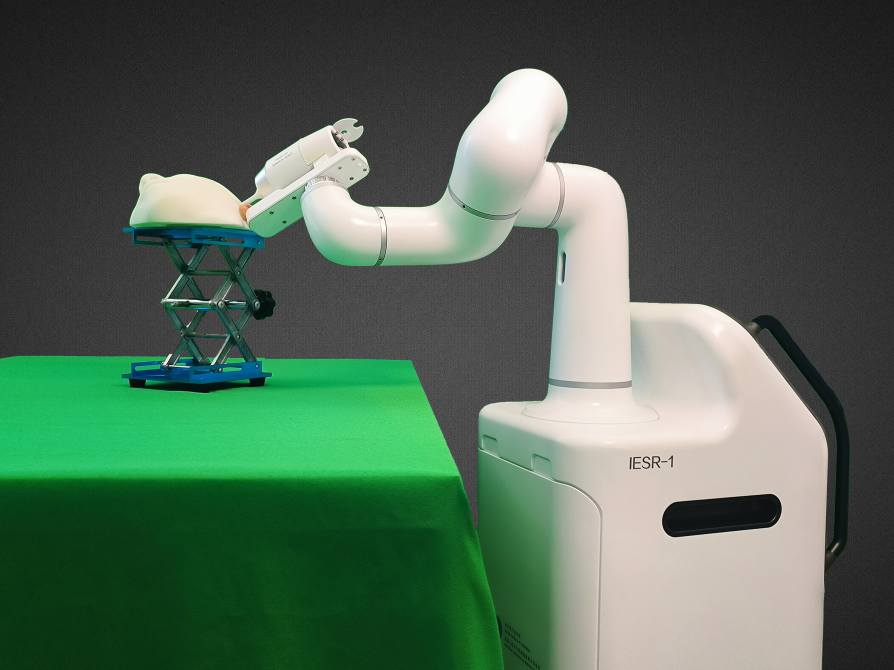
DS-MDCR的整体系统配置
内耳疾病如突发性感音神经性聋、梅尼埃病及耳鸣等,严重影响患者生活质量。由于内耳深藏于颞骨内部,长期以来相关诊疗面临“难到达、难取样、难精准治疗”的现实难题。现有治疗方式中,系统给药受血-迷路屏障限制,局部给药又存在药物渗透不足和消散较快等问题。同时,耳道和中耳区域空间狭小、路径弯曲、个体差异明显,传统器械难以在确保安全的前提下完成高精度操作。因此,发展兼具微型化、灵巧操控和组织交互感知能力的新型微创手术装备具有重要意义。
针对上述难题,团队研制了一种低长径比双节段连续体机器人,实现了导引、可视化和操作功能一体化集成。机器人采用无过渡关节的鞍形关节结构,在外径2毫米、长度小于7毫米的紧凑尺寸下,实现最大±136°平面弯曲角和1.9毫米最小弯曲半径,可形成可编程C形、S形三维构型,更好适应复杂内耳解剖路径。该机器人还配备了集成光纤布拉格光栅传感器的微针系统,构建独立穿刺自由度与实时力反馈能力,使微针定位精度达到17.9±4.1微米,能够有效感知工具与组织交互状态,提升手术操作安全性与成功率。
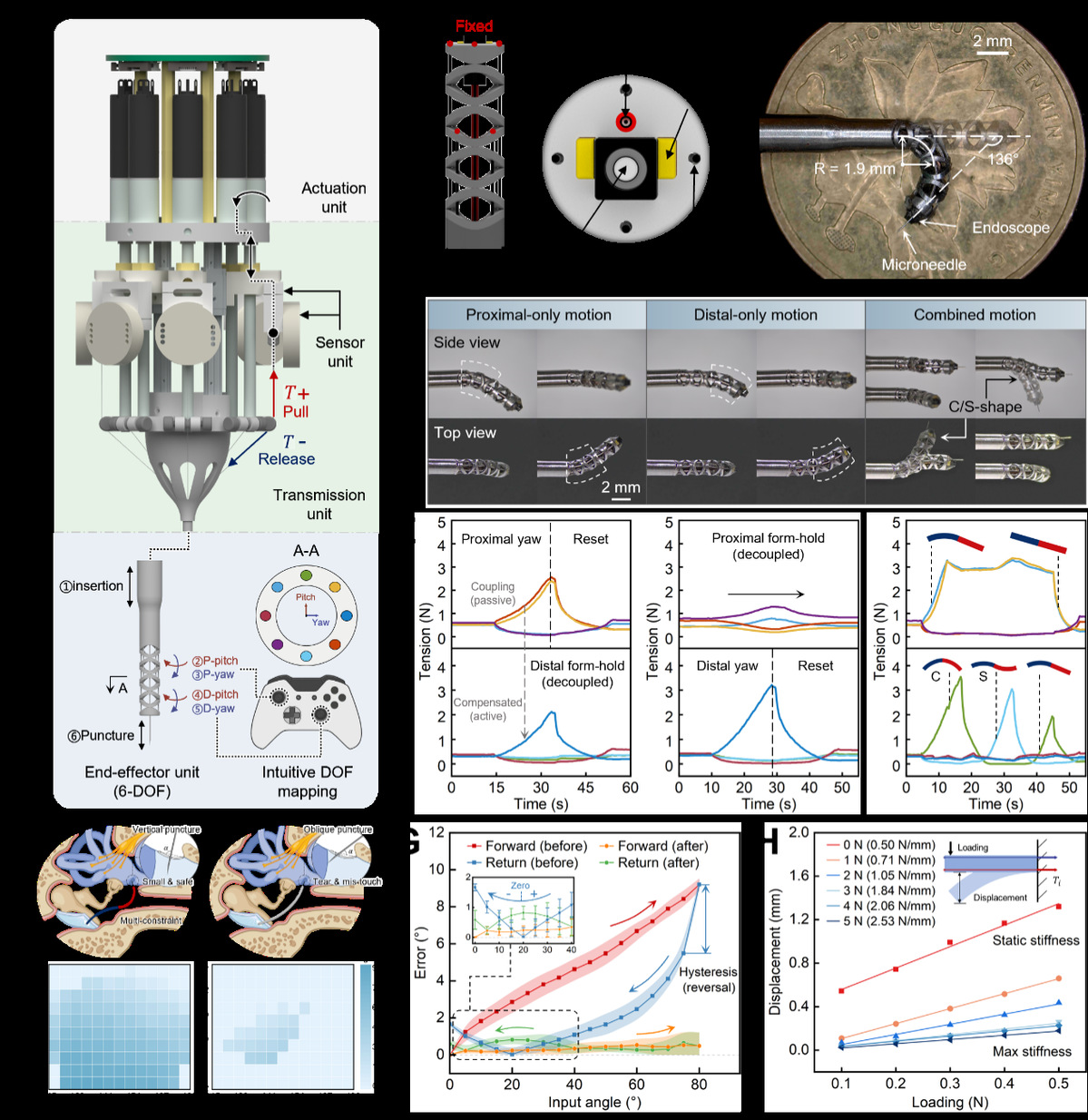
DS-MDCR的设计与性能表征
为验证系统性能,团队开展了离体人体标本实验和活体动物实验。结果表明,该机器人可经外耳道路径稳定完成圆窗膜靶向穿刺、内耳液采样及耳蜗内注射等操作,避免了传统高创伤手术路径。动物实验显示,术后未见明显并发症,听阈变化不显著,圆窗膜穿刺点和鼓膜切口均可逐步愈合,验证了该技术路线的有效性与安全性。研究人员表示,该系统未来还有望结合远程操控、增强现实导航和智能感知技术,进一步拓展在基层医疗和精准诊疗场景中的应用。
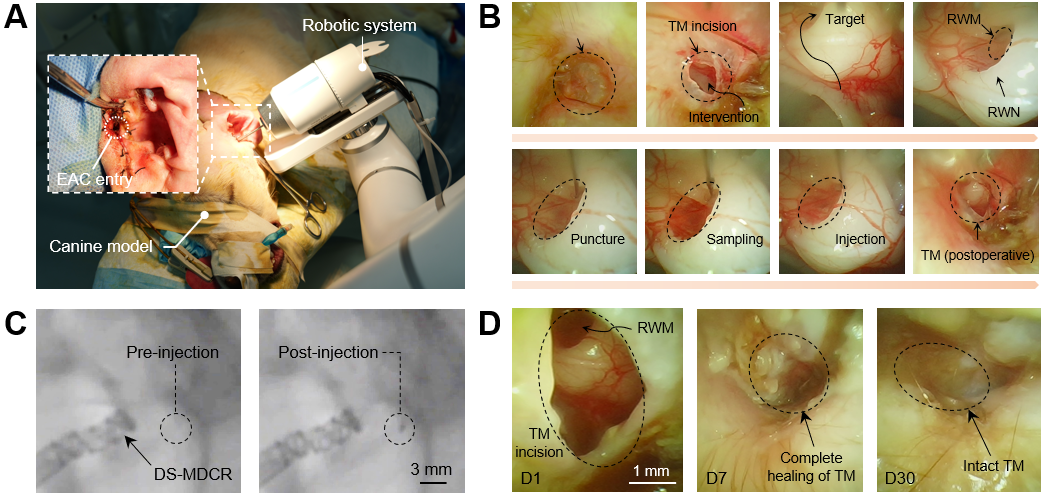
大动物(犬)实验验证及鼓膜愈合情况
文章的整体工作总结
哈工大机器人技术与系统全国重点实验室为论文第一通讯单位。机电工程学院张赫教授、北京航空航天大学张天雪助理教授、上海交通大学医学院附属第九人民医院贾欢主任为论文共同通讯作者。机电工程学院博士研究生李海铭、高培源,上海交通大学医学院附属第九人民医院主治医师谭皓月为论文共同第一作者。哈工大、上海交通大学医学院附属第九人民医院、北京航空航天大学、中山大学深圳校区、山东大学等单位学者参与本项研究工作。
该项目获国家重点研发计划、国家自然科学基金项目、黑龙江省自然科学基金杰出青年项目、黑龙江省重点研发计划项目等资助。
论文链接:https://www.nature.com/articles/s41467-026-72398-5