哈工大报








最新发布
- 06-25
- 06-24
- 06-23
- 06-23
- 06-23
- 06-23
- 06-23
- 06-22
机器人技术与系统全国重点实验室医用微纳机器人研究成果入选《自然》研究亮点
-
分享
微信扫一扫:分享
哈工大全媒体(于世民 文/图)近日,机器人技术与系统全国重点实验室、哈尔滨医科大学第一附属医院等联合开发出仿水熊虫医用微纳机器人,可实现在静脉血高速流环境中可控运动及靶向驻停,相关成果以《可在血管中靶向驻停的仿水熊虫医用微纳机器人》(Bioinspired claw-engaged and biolubricated swimming microrobotscreating active retention in blood vessels)为题,发表在《科学进展》(Science Advances)上。同时,《自然》(Nature)杂志以《仿水熊虫爪形结构为游动微纳米机器人提供抓地力》(Claws like a tardigrade’s give swimming microrobots a grip)为题将该成果作为研究亮点(Research highlight)进行报道。
微纳机器人凭借其体积小、质量轻、推重比大等特点,在药物靶向递送领域具有很好的发展前景。然而,多年来却因面临如何实现在血液高流速环境下高效驱动、如何实现循环系统内靶向释放等挑战而无法在医学上应用。
针对上述问题,研究团队设计了一种仿水熊虫医用微纳机器人,可以让机器人“跑得更快”,其模仿缓步动物水熊虫利用爪子在动态环境中的运动方式设计了爪形表面结构,以提高微纳机器人的驱动效率,实现了让直径20微米的机器人可在20000微米/秒的静脉血流环境中高效运动。为让机器人“停得住”,团队通过多磁场复合调控技术,实现了微纳机器人在生物组织表面可控驻停及药物靶向释放,驻停时间大于36小时。该研究可显著提高药物靶向递送效率,为恶性肿瘤精准治疗提供新思路。
哈工大为论文第一单位。机器人技术与系统全国重点实验室李天龙教授、博士研究生于世民,哈尔滨医科大学附属第一医院孙备教授、李轶副研究员为共同第一作者。机器人技术与系统全国重点实验室吴志光教授、赵杰教授为论文共同通讯作者。机器人技术与系统全国重点实验室任玉坤教授、潘昀路教授、格拉顿教授,博士研究生王鑫龙、宋春磊、张展翔为论文共同作者。该研究工作得到张广玉教授的指导和大力支持。
该研究获得国家重点研发计划、国家自然科学基金、哈工大医工理交叉基金等项目资助。
论文链接:https://www.science.org/doi/10.1126/sciadv.adg4501
《自然》研究亮点报道链接:https://www.nature.com/articles/d41586-023-01541-9
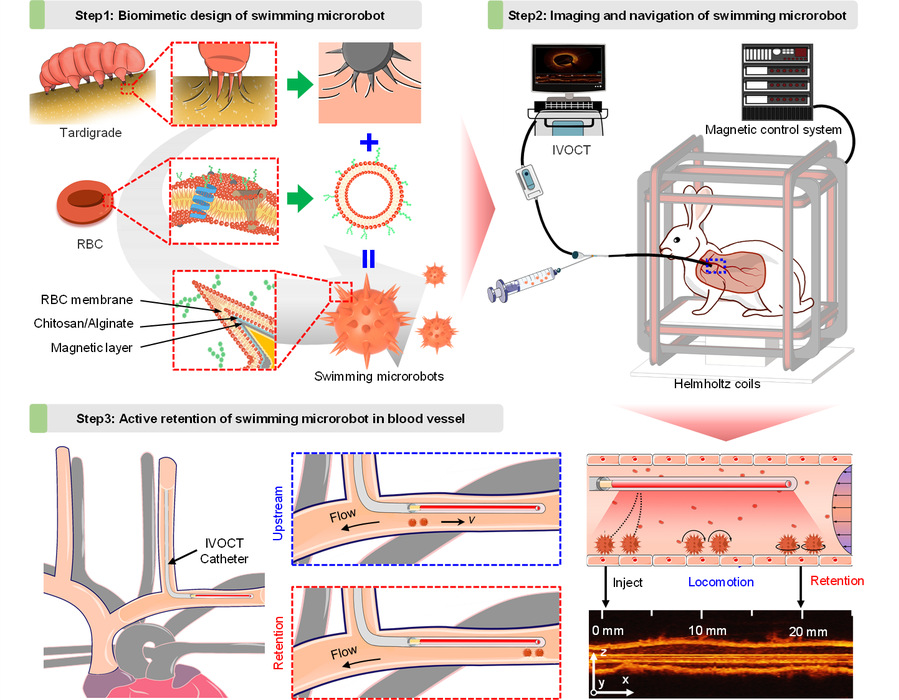
仿水熊虫医用微纳机器人工作原理

《自然》研究亮点报道